Projects
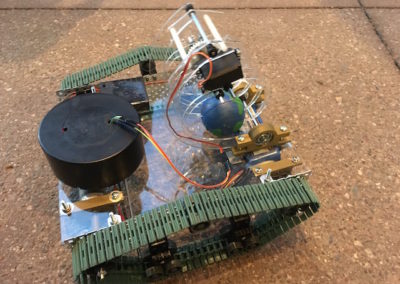
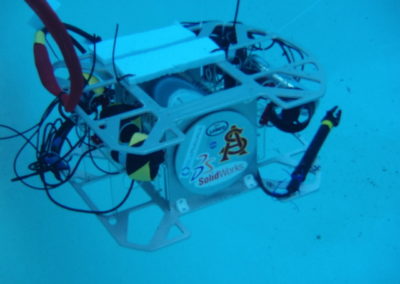
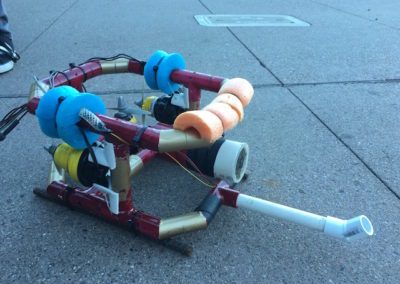
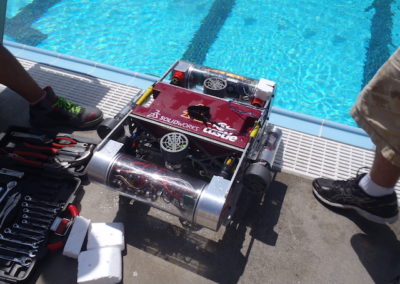
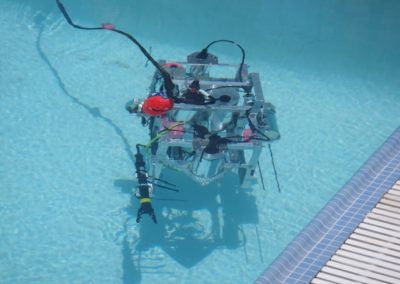
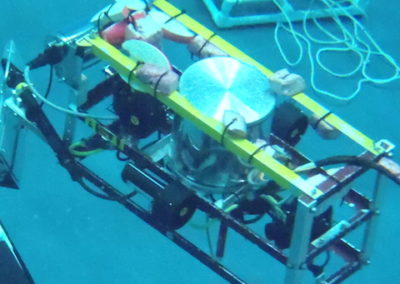
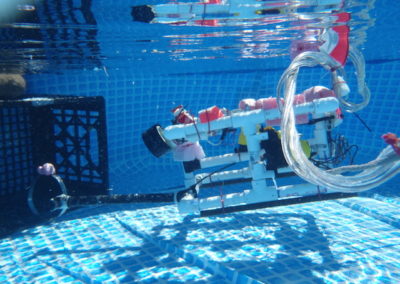
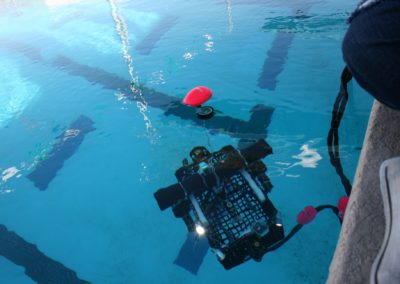
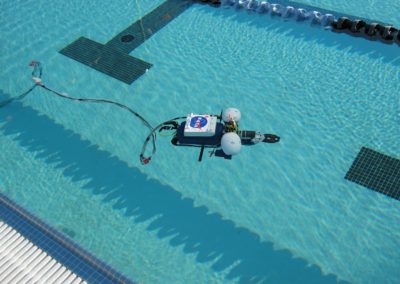
The NASA Space Grant Robotics club builds a variety of robots to compete in underwater competitions. These robots (or Remotely Operated Vehicles, ROVs) have to be able to submerge the bottom of a pool, move items around on the bottom, retrieve things to the surface, and take some sort of sensor readings. The MATE competition has the robot do this under a pilot’s control with an onboard camera and a control system on the surface connected with a tether. The NURC competition, recently revived, will be similar to MATE, but conducted outside in the early morning to simulate a deep sea environment. The AUVSI competition adds the challenge of doing all this with no human interaction.
We are currently engaged in designing an entirely new ROV. We also have training modules to give our new members (who are mostly freshmen) experience with things like SolidWorks, Arduino, soldering, and trade studies. There is also
Current System Teams:
- Mechanical
- Electrical
- Programming