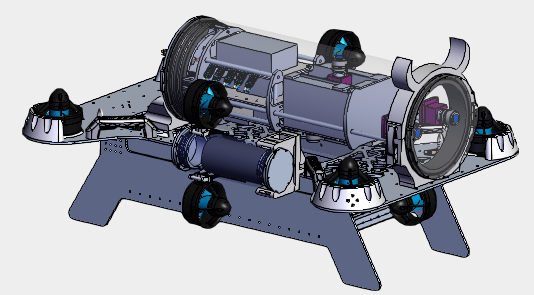
This is a render of the first Autonomous Underwater Vehicle (AUV) designed by our team for the AUVSI Robosub 2020 Competition. This robot featured a simple design with an emphasis on completing the navigation challenges at the event. Unfortunately this robot was never constructed due to global events in the Spring and Summer of 2020. The team will be learning from this design for future AUVs and hope to be able to field a complete AUV next year.
Our 2019 NURC robot Plan C featured 8 Blue Robotics T100 Thrusters, a wide angle fisheye foreward camera and a 2 Degree of Freedom Main claw.

AquaDevil was our 3rd attempt at an underwater ROV. We first used AquaDevil in the MATE 2010 competition, where we won 6th place, and received many compliments on the design from the judges.
AquaDevil was used as a back-up robot. She most recently saw use at the 2013 NURC alongside ROVINA, where she earned third place.
Gauss is our robot from the 2011 games. She also competed in the 2012 NURC competition.
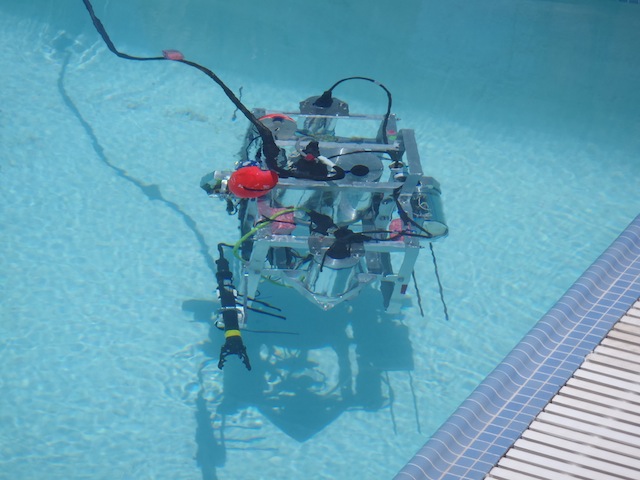
ROV-IS-A-BOX, (RIAB) was constructed for the NURC and MATE competitions in 2009. She features five Seabotix thrusters, four cameras, an array of sensors and a very powerful claw.


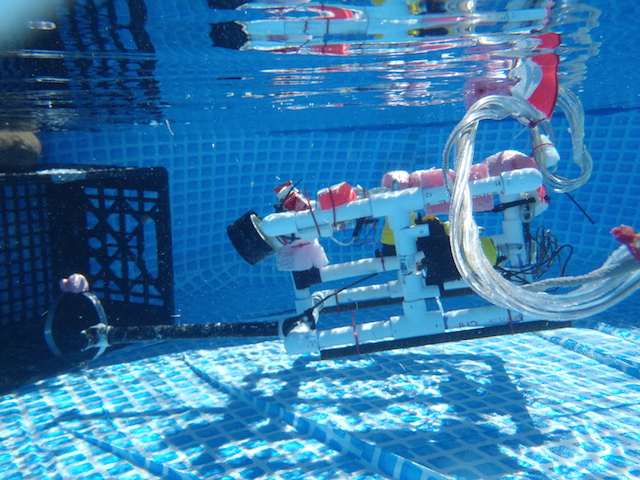
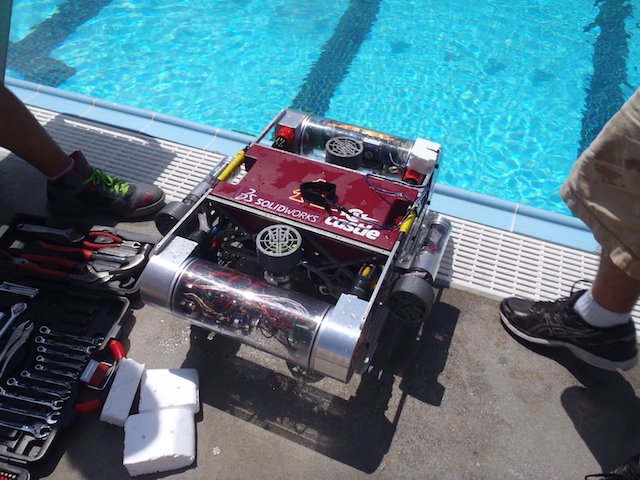
This year we have built a new robot to compete in the MATE competition. ASUB features a single enclosure with dual o-rings on all seals, gasket seal on electronics tray, and easy access to internal components. ASUB is powered by six Blue Robotics T-100 thrusters and features a custom claw, stereo webcams, and a downward-pointing webcam inside the main enclosure.
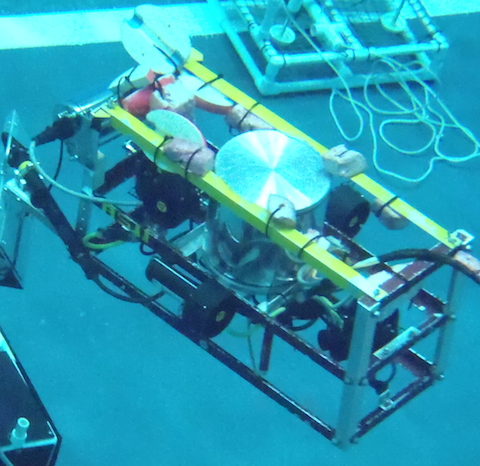
Koi is our previous ROV for piloted missions. She first competed in the 2012 MATE competition and has also entered competitions in 2013, 2014, and 2015.
She has two electronics enclosures, one front and one back. The front contains an onboard Windows PC, an Arduino Mega Mini microcontroller, a webcam, a pressure sensor, and an IMU to monitor acceleration and heading. The rear contains power converters, speed controllers for the claw, a second webcam, and an Arduino Mega microcontroller.
The front microcontroller takes in data from the pressure sensor and IMU and controls the servo on the front camera. The rear microcontroller controls the thrusters and claw. Each thruster is connected to a custom enclosure wired by the team that contains a speed controller and power converter. This way, each thruster is modular and can be mounted and demounted independently.
To control the robot, the pilot connects an Ethernet line on the surface end of the tether to their laptop, sends a wakeonlan signal to the onboard PC to turn it on, then connects to it using Remote Desktop Connection. From there, they activate a custom program on the robot that allows them to view camera feeds and sensor data and pass down the control signal from an Xbox controller. The tether also contains lines for 48V power supply from the surface (with a 20A fuse at top) and a second Ethernet line carrying up to four analog video signals.

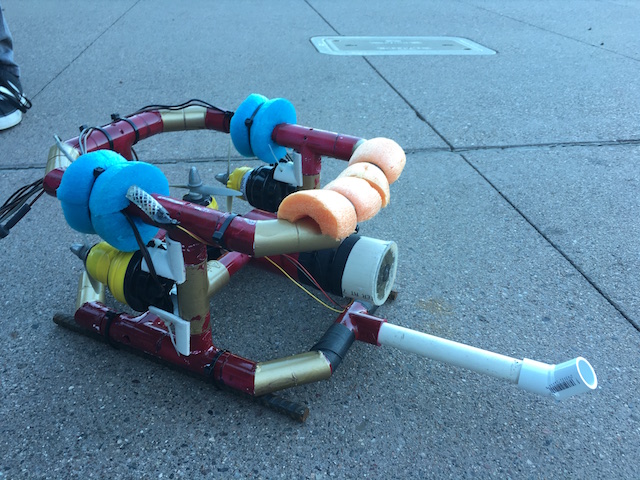
Brovina is our new demonstration robot used for outreach events. She was constructed in fall 2015 and debuted at the September Earth & Space Open House. She is controlled via a simple dual joystick setup, with one for climb/dive and one for forward/backward/left/right. The joysticks are simple switches which take in 12V from the power supply and send it to six digital pins on an Arduino Mega microcontroller. The Arduino then sends a signal to the three speedcontrollers, which send power to the three onboard motors. We use the speed controllers because the microcontroller does not output enough voltage to drive the motors directly. The microcontroller, switches (both through a 5A fuse), the speed controllers (each through a 10A fuse), and the onboard analog camera are powered by a surface-side power supply affectionately dubbed “Big Blue” (or a 12V battery). Big Blue and the monitor for the camera are run off standard 120V AC wall power.
ROVINA is the robot we used to use for demonstration purposes. We brought her out at various campus events and let visitors drive her around. There’s usually a simple mission set up in a kiddie pool or fountain involving retrieving a ring and bringing it back to a box. She’s also been used at a couple of competitions in the past (usually as an “eye in the sky” since pilots face away from the pool).